第一个机器人
どの仕事を始めますか、先生。
您想从什么工作开始?老师。
——Plana
先决条件
TIP
请确保服务器防火墙对端口放行
为了能够正常的进行接下来的步骤,请确保准备好了如下内容
NapCat服务器,您需要知道如下信息
创建
WebSocket服务器网络配置服务器IP:可以被开发机访达的公网或内网IP
端口:websocket通信端口
token:在创建WebSocket服务器时填写的令牌
创建时消息格式请选择
array打开
强制推送事件
登录napcat的qq号
安装
创建一个控制台程序,保证其版本>=.NET 6.0
用你喜欢的方式安装软件包NapPlana.NET
nuget控制台
Install-Package NapPlana.NETTIP
项目依赖TouchSokcet作为网络通信库,若你的项目之前有引用过,请保证其版本不低于4.0.0-rc.5
Coding Time!
创建机器人实例
框架使用一个工厂BotFactory来创建NapBot实例,支持链式写法,以下是创建方法
using NapPlana.Core.Bot;
using NapPlana.Core.Data;
var bot = BotFactory.Create()
.SetSelfId(123456) //机器人QQ号
.SetConnectionType(BotConnectionType.WebSocketClient)//连接类型,目前只支持这种
.SetIp("xxx.xxx.xxx.xxx") //服务器IP地址
.SetPort(6700) //服务器端口
.SetToken("your_bot_token_here") //机器人Token
.Build();此时你已经创建好了一个机器人实例,但是机器人还没正式连接到napcat服务器,我们先不着急,请继续看
订阅事件
框架内使用BotEventHandler这个静态类来管理机器人事件触发和订阅,我们可以先从一个简单的事件来下手
OnLogReceived是框架内的内置事件,可以通过订阅这个事件来接收框架内的日志
//注册日志回调事件
BotEventHandler.OnLogReceived += (level, message) =>
{
// 过滤掉Debug日志
if (level == LogLevel.Debug)
{
return;
}
//可以接入自己的日志系统
Console.WriteLine($"[{level}] {message}");
};这样在机器人上线时或进行其他操作就会输出日志到控制台
WARNING
如果你在订阅事件后发现机器人反复进行某一事件,如当检测到hello发送的时候也回复一个hello你会发现机器人可能一直在发消息,这是因为OnGroupMessageReceived等事件在机器人自己发送了消息的时候也会触发,如果要使用类似的功能,请在一开头
//当检测到动作发出者的id和bot的id一致时返回
if (notice.UserId == bot.SelfId)
{
return;
}发送Hello World!
此时我们的机器人实例就派上用场了,在此之前我们先介绍一下MessageChainBuilder,这是一个工厂,可以帮助你快速获取List<MessageBase>它可以添加很多类型的消息,但我们今天就只添加一个文字消息
var hello = MessageChainBuilder.Create()
.AddTextMessage("Hello, World!")
.Build();现在我们启动机器人实例
//启动机器人
await bot.StartAsync();然后我们访问机器人实例,发送这条消息
//发送群消息
var result = await bot.SendGroupMessageAsync(new GroupMessageSend()
{
GroupId = "123456789", //目标群号
Message = hello
});控制台会有如下记录
[Info] 机器人已连接到NapCat服务器
[Info] 机器人连接至napcat...等待后续操作这时请查看群聊
百尺竿头
我们可以设计一个简单的功能:当群里有人说 hello的时候,机器人回复这个人的消息,并回答@该人,回答hi
你可能会好奇,发送消息时的var result是干啥的?
在不同的请求下它的类型不同,但在此处,他是一个GroupMessageSendResponseData,里面包含了这条消息的id,虽然我们在第一个机器人中用不到他,但其说明了一件事:每条消息都有它独属的id,由此我们可以来完成以上需求。
直接给出代码
BotEventHandler.OnGroupMessageReceived += async (messageEvent) =>
{
//排除自己发的消息
if (messageEvent.UserId == bot.SelfId)
{
return;
}
//检测消息内容是否包含特定关键词
//之后这里会做出简化
var isExist = messageEvent.Messages
.Any(x => x is TextMessage { MessageData: TextMessageData data } && data.Text.Contains("hello"));
//对于这个场景,还有个更好的方案,那就是使用RawMessage
//isExist = messageEvent.RawMessage.Contains("hello");
if (isExist)
{
//回复消息
//注意:如要回复一条消息,那么这条消息链的第一条一定是reply message
//由于napcat内部没有统一的问题?故这里需要做一些long到string的转换
var replyMessage = MessageChainBuilder.Create()
.AddReplyMessage(messageEvent.MessageId.ToString())
.AddMentionMessage(messageEvent.UserId.ToString())
.AddTextMessage(" hi")
.Build();
await bot.SendGroupMessageAsync(new GroupMessageSend()
{
GroupId = messageEvent.GroupId.ToString(),
Message = replyMessage
});
}
};效果如下
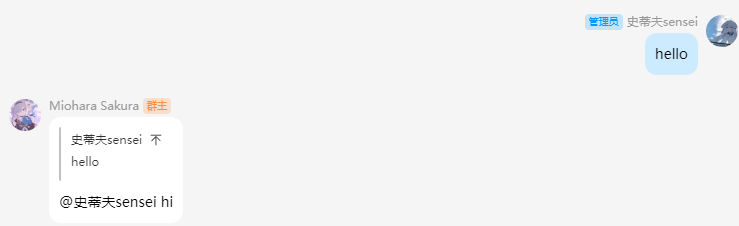
这样,一个简单的问答机器人就做好了
更进一步
你已到达百尺竿头,只需更进一步
你可能发现你的控制台在运行结束后自动关闭了,这不是你想要的
所以,你选择在程序的最后将其卡住
var cts = new CancellationTokenSource();
Console.CancelKeyPress += async (s, e) =>
{
e.Cancel = true;
await bot.StopAsync();
cts.Cancel();
};
try
{
await Task.Delay(Timeout.Infinite, cts.Token);
}
catch (TaskCanceledException)
{
}小结
根据以上的教程,你应该可以做一个简单的机器人了,接下来请浏览API文档,看看你能做出什么神奇的机器人吧
肯定。老师我看好你哦
—— Plana
完整代码
using NapPlana.Core.Bot;
using NapPlana.Core.Data;
using NapPlana.Core.Data.API;
using NapPlana.Core.Data.Message;
using NapPlana.Core.Event.Handler;
var bot = BotFactory
.Create()
.SetSelfId(123456789)
.SetConnectionType(BotConnectionType.WebSocketClient)
.SetIp("xxxxxxx")
.SetPort(6100)
.SetToken("x")
.Build();
//注册日志回调事件
BotEventHandler.OnLogReceived += (level, message) =>
{
// 过滤掉Debug日志
if (level == LogLevel.Debug)
{
return;
}
//可以接入自己的日志系统
Console.WriteLine($"[{level}] {message}");
};
var hello = MessageChainBuilder.Create()
.AddTextMessage("Hello, World!")
.Build();
//启动机器人
await bot.StartAsync();
//发送群消息
var result = await bot.SendGroupMessageAsync(new GroupMessageSend()
{
GroupId = "769372512", //目标群号
Message = hello
});
//更进一步
BotEventHandler.OnGroupMessageReceived += async (messageEvent) =>
{
//排除自己发的消息
if (messageEvent.UserId == bot.SelfId)
{
return;
}
//检测消息内容是否包含特定关键词
//之后这里会做出简化
var isExist = messageEvent.Messages
.Any(x => x is TextMessage { MessageData: TextMessageData data } && data.Text.Contains("hello"));
//对于这个场景,还有个更好的方案,那就是使用RawMessage
//isExist = messageEvent.RawMessage.Contains("hello");
if (isExist)
{
//回复消息
//注意:如要回复一条消息,那么这条消息链的第一条一定是reply message
//由于napcat内部没有统一的问题?故这里需要做一些long到string的转换
var replyMessage = MessageChainBuilder.Create()
.AddReplyMessage(messageEvent.MessageId.ToString())
.AddMentionMessage(messageEvent.UserId.ToString())
.AddTextMessage(" hi")
.Build();
await bot.SendGroupMessageAsync(new GroupMessageSend()
{
GroupId = messageEvent.GroupId.ToString(),
Message = replyMessage
});
}
};
// Graceful shutdown on Ctrl+C
// Prevent the process from terminating immediately
var cts = new CancellationTokenSource();
Console.CancelKeyPress += async (s, e) =>
{
e.Cancel = true;
await bot.StopAsync();
cts.Cancel();
};
try
{
await Task.Delay(Timeout.Infinite, cts.Token);
}
catch (TaskCanceledException)
{
}